Introduzione
Ricordiamo che vogliamo cercare di arbitrare l’accesso al canale fisico sottostante. In questo momento andiamo ad assumere di avere già tutto l’impianto di trasmissione fisica che abbiamo in Tecnologia Wireless, Modulazione wireless Fisica del Wireless.
Obiettivi:
- Arbitraggio del singolo canale fisico (la tesi di dottorato del prof era su collision avoidance di wifi).
- Sia in tempo
- Sia in spazio (come gestire il segnale mandato nello stesso spazio)
- Utilizzo minimo di energia
- Quality of service
- Adaptive behaviour (come il 6G che vuole andare ad utilizzare AI per fare predizione).
- Evitare segnale spaghetti o jammed
- Collisioni fanno sprecare energia ad entrambi (sia ricevente sia sender)
- bisogna trovare un metodo per fare risoluzione (controllare il sender riguardo la trasmissione, in quanto non sono in grado di trasmettere e ascoltare in modo contemporaneo)
- Questo si lega alla parte di arbitraggio del canale
Ricordiamo che ethernet provava ad ascoltare il segnale e provare a trasmettere, si può utilizzare la stessa cosa anche qui? No, ethernet permetteva di ascolatare il segnale nel momento di generazione, mentre wifi non può, perché semplicemente il segnale prodotto localmente è molto più grande. Inoltre wifi ha anche bisogno di fare multiplexing sullo spazio non solo nel tempo come per l’ethernet.
Anticollisione primo tentativo
Allora, in questa parte continuiamo ad analizzare un protocollo che tenti di evitare la collisione, si può utilizzare un sistema simile ad ethernet?
- Risposta negativa: non evita le collisioni
-
Slide fenomeno
Nonostante i senders non sentano niente, c’è interferenza, credo si chiami anche problema del terminale nascosto, perché non senti l’interferenza (asimmetria di informazioni).
- Non arbitra niente alla fine…
Classificazione accesso multiplo MAC-WIFI
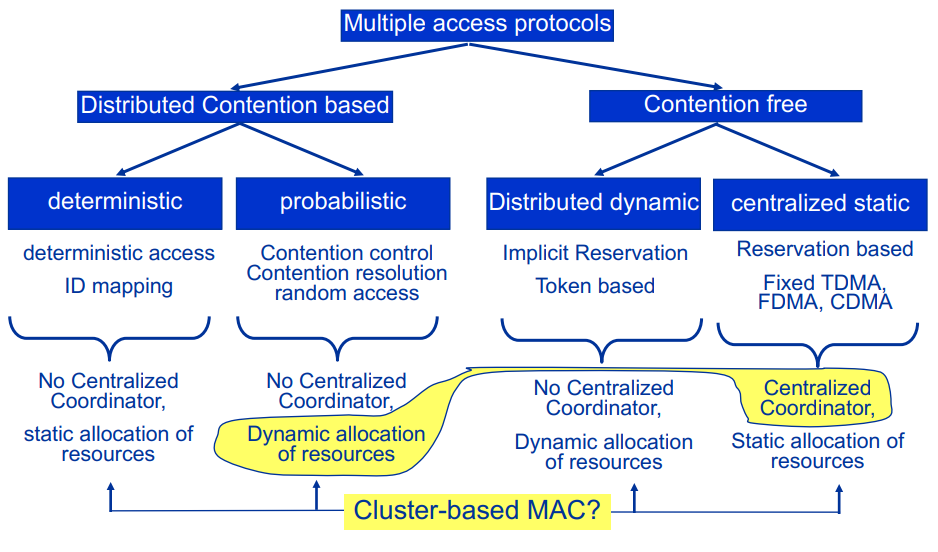
- Senza contesa, ossia si cerca di evitare la contesa della rete wifi
- Centralizzati statici, con un coordinatore statico che dica quando puoi comunicare (prenotazioni registrate da un coordinatore) → garanzia del servizio
- Costo coordinatore (centralizzato, quindi se cade cade tutto, facile da attaccare)
- Costo allocazione statica delle risorse.
- token-based chi vuole comunicare tiene solamente il token (solo che il rischio è che si perda il token per una interferenza o simili).
- Centralizzati statici, con un coordinatore statico che dica quando puoi comunicare (prenotazioni registrate da un coordinatore) → garanzia del servizio
- Content, provare a prendersi il segnale, o provare finché non ci si riesce.
- Probabilistico è quello più sicuro dal punto di vista della sicurezza, e ha allocazione dinamica di servizi (provare a comunicare a tempi random, probabilisticamente parlando provandoci così prima o poi si comunicherà). Solo che ha il problema delle collissioni ,quindi sarebbe molto buono questo metodo di allocazioen dinamica con il server centrale (0 collisioni e 0tempi vuoti). Solo che il coordinatore ha un costo. → reliability della comunicazione.
- Deterministico (mi sono distratto a configurare alacritty e non ho capito).
Abbiamo un accesso probabilistico in cui si prova a comunciare nel vuoto (nel senso che non si può spegnere questa rete, nel caso della presenza di un accesso centralizzato allora si utilizza quella. (ma nessuno paga))
Aloha protocol
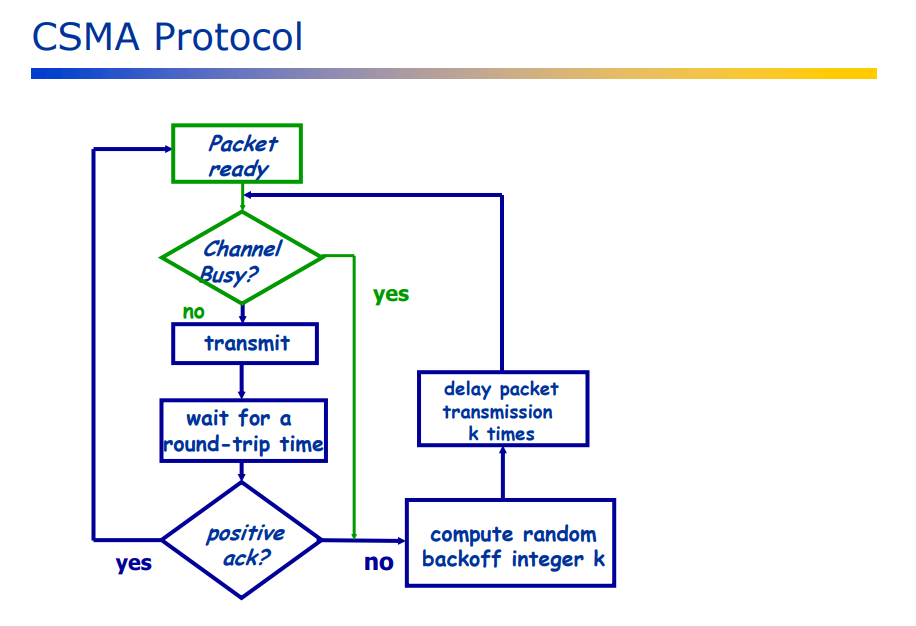
Funzionamento in breve
È stato uno dei primi protocolli radio presenti. Stiamo parlando di 1970, Abramson1970 era alle Hawaii e aveva solamente dispositivi radio a disposizione, sono le prime sperimentazioni.
<img src="/images/notes/image/universita/ex-notion/Mac Wifi/Untitled 2.png" style="width: 100%" class="center" alt="image/universita/ex-notion/Mac Wifi/Untitled 2">
Il round trip time veniva calcolato, se non riceve l’ack aspetta un tempo un pò random. (il seme sarà diverso, tipo l’id della scheda di rete, il tempo di backoff che coincida è abbastanza basso)
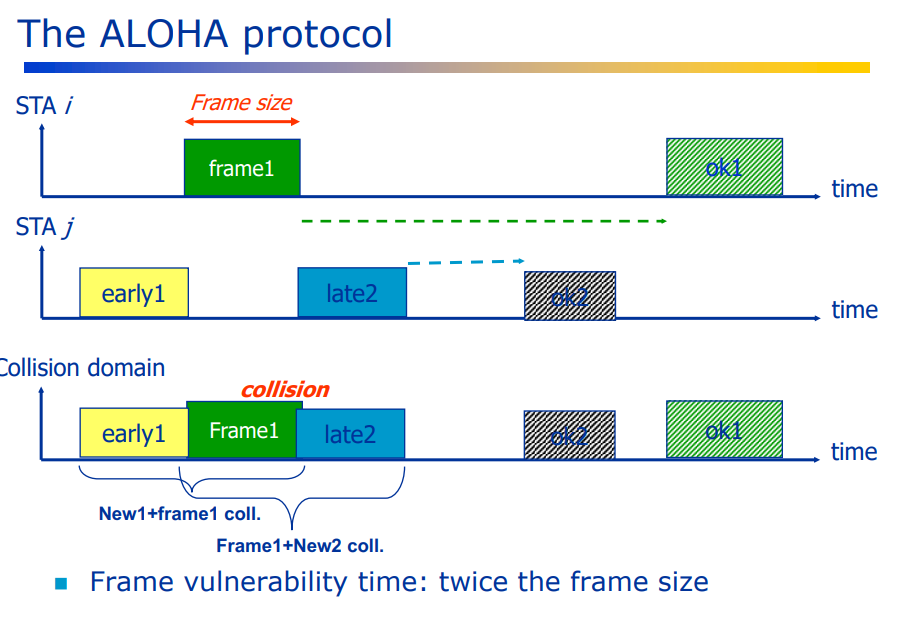
Analisi dominio di collisione
Ci vogliamo chiedere quando è il time frame in cui può avvenire una collisione?
Siano due comunicanti, che devono entrambi trasmettere, se uno trasmette, quando non potrebbe trasmettere l áltro per evitare la connessioen? Ci interessa solamente il tempo.
La risposta è semplice, vogliamo solo che sia una dimensione di frame prima e una dimensione di frame dopo: tempo/slot di collisione è due volte.
-
Slide intuizione dominio di collisione
Con questa osservazione, possiamo cambiare leggermente l’algoritmo di aloha al fine di risolvere, o meglio alleviare, il problema della collisione:
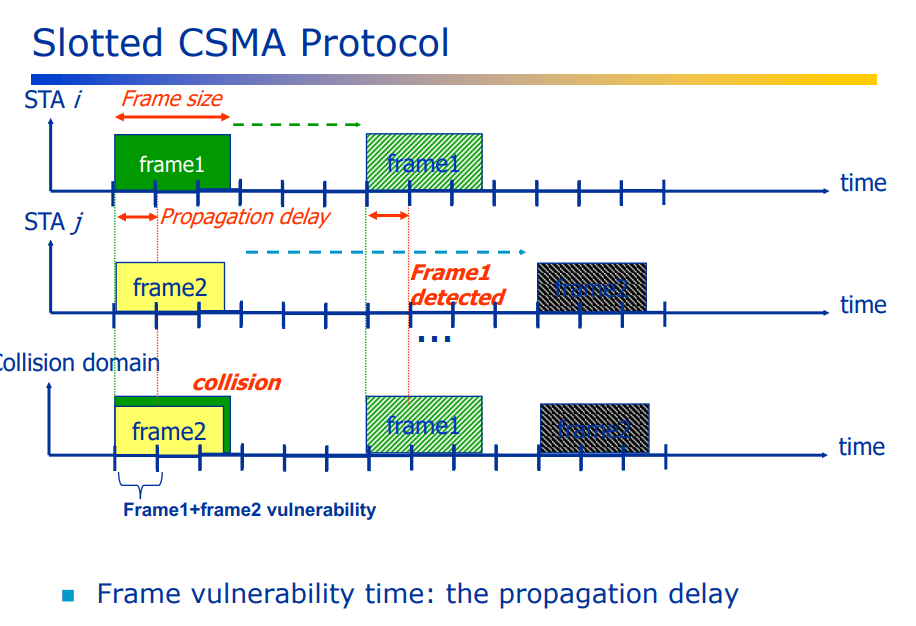
Slotted aloha
Lo slotted aloha permette solamente la trasmissione in certi slot di tempo, questo aiuta ad alleviare il problema della collisione:
Ha senso che la dimensione dello slot è dimensione massima del frame con anche trasmission delay vogliamo andare a contare anche il delay della trasmissione perché altrimenti due frames possono comunque influenzarsi fra di loro durante la trasmissione.
-
Slide slotted aloha
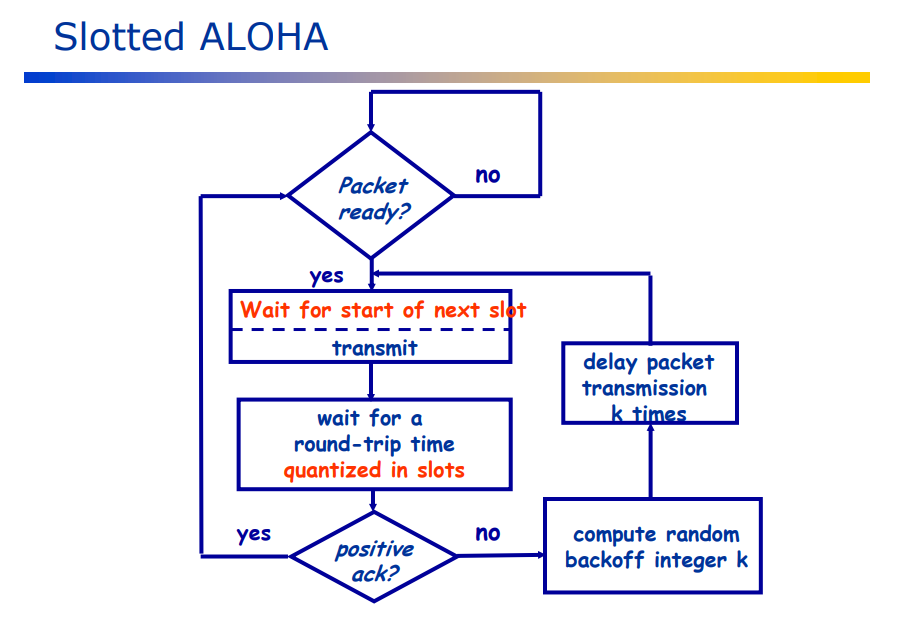
Quindi ora il tempo di vulnerabilità è ridotto a slot + propagation, invece che due slots (anche se solitamente pensavo che il tempo di propagazione è maggiore? Credo dipenda…).
CSMA
Carrier sense multiple access
Introduzione all’algoritmo
In questo caso il FVT (frame vulnerability time) è due volte il propagation, perché se sono dentro a questo intervallo allora non sento il segnale dell’altro, che non è ancora arrivato. Questo valore solitamente è molto più piccolo rispetto al frame size.
Slotted CSMA
Alla fine molto simile questa idea allo slotted aloha, tutti possono trasmettere soltanto in certi slots di times
Throughput comparison
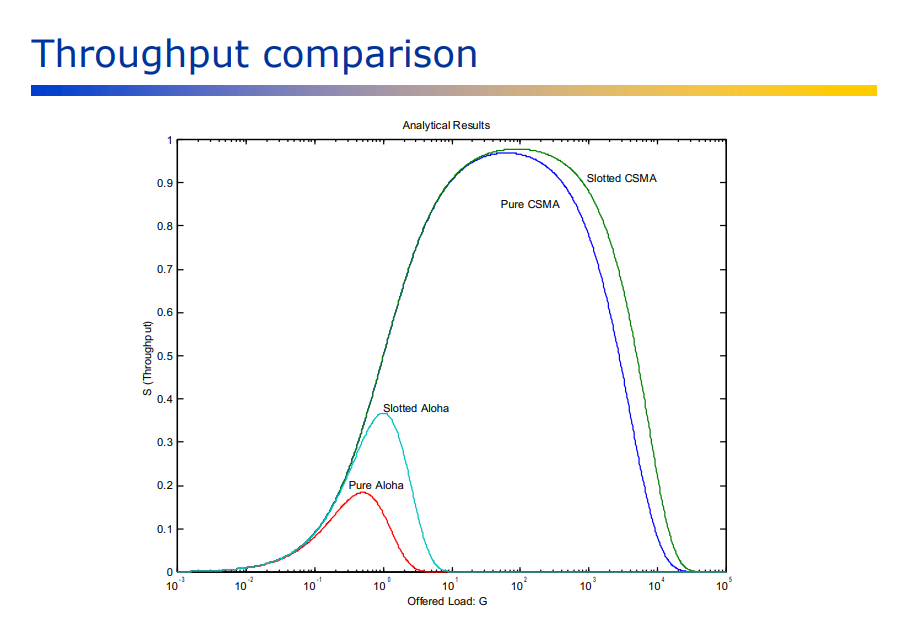
Vediamoc he il throughput cambia molto seguendo i protocolli (e va giù perché ci sono troppe collisioni se provo a trasmettere troppo.
Mi serve sapere il numero di stazioni trasmittenti, una cosa che non conosco generalmente.
MACA
hidden and exposed terminals
Vogliamo cercare di limitare le trasmittenti a comunicare bene con un ricevitore (sto ragionando sull esempio di ACBD in mezzo) cioè in un caso di hidden terminal in cui due senders non si sentono fra di loro, ma il loro segnale potrebbe interferire in un certo punto.
Un problema opposto è il exposed terminal quando il sender è condiviso da più host, un host che vorrebbe comunicare, a un host diverso, non può comunicare perché sente questo.
RTS and CTS
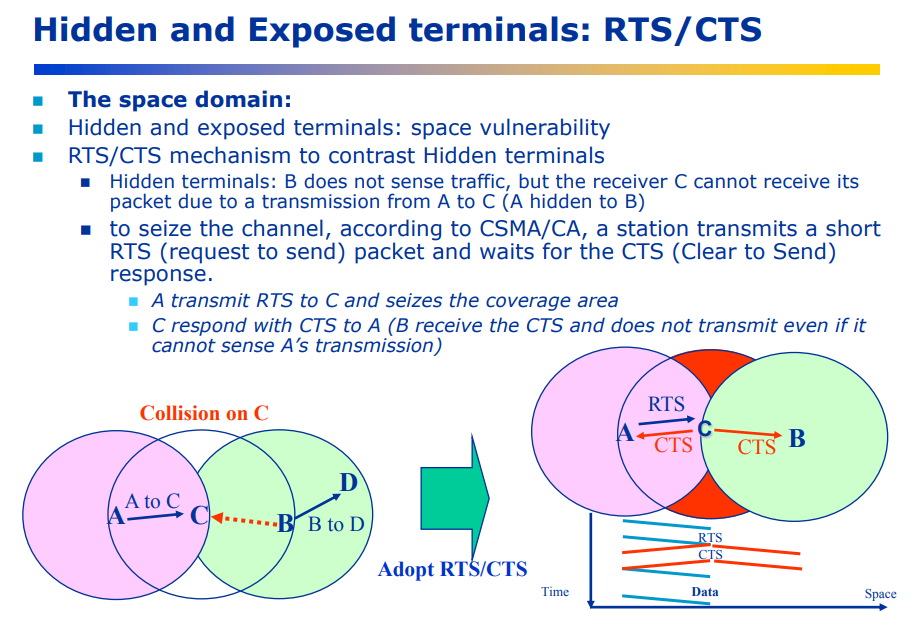
Un altro problema di hidden terminal oltre alla trasmissione su un terminale comune è il fatto che se CB provano a comunicare a persone differenti (rispettivamente ad A e D, B non può perché sente ricevere).
Una soluzione semplice è semplicemente chiedere al canale ricevente se ci sono interferenze o meno. (un pacchetto breve che si chaiama RTS (request to send).) questo è un piccolo pacchetto, potrebbe interferire, si spera che faccia molti pochi interferenze.
Il ricevitore risponde con un CTS (clear to send) Se il cts è ricevuto allora comincia a rispondere.
→ Non ho carrier sensing qui.
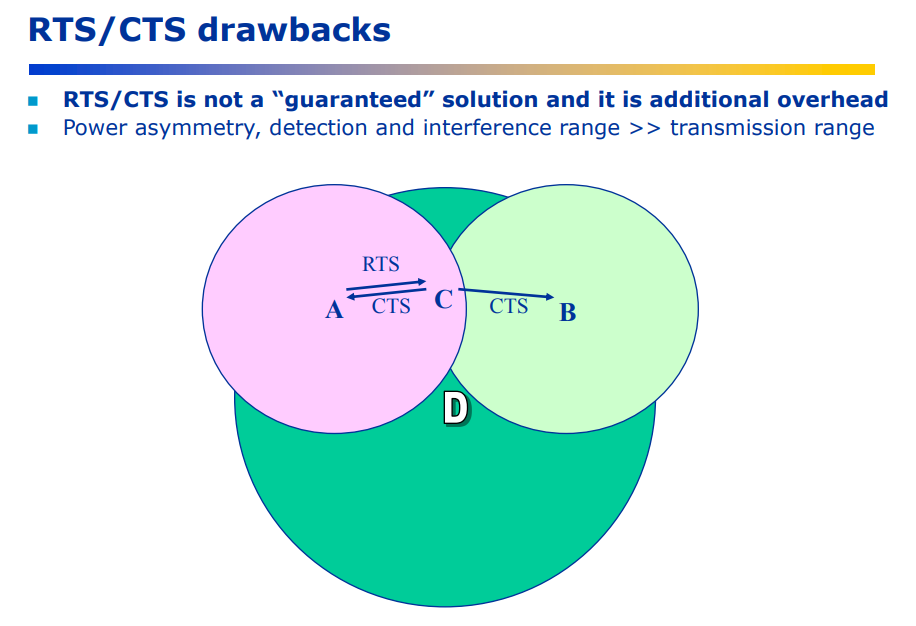
RTS and CTS drawback
Non abbiamo garanzia di comunicazione senza interferenze, questa garanzia c’è solamente quando il range di comunicazione sono uguali fra di loro, un esempio in cui non funziona è l’esempio qui sotto in cui esiste una rete grande ch epossa andare a fare interferenza con tutte.
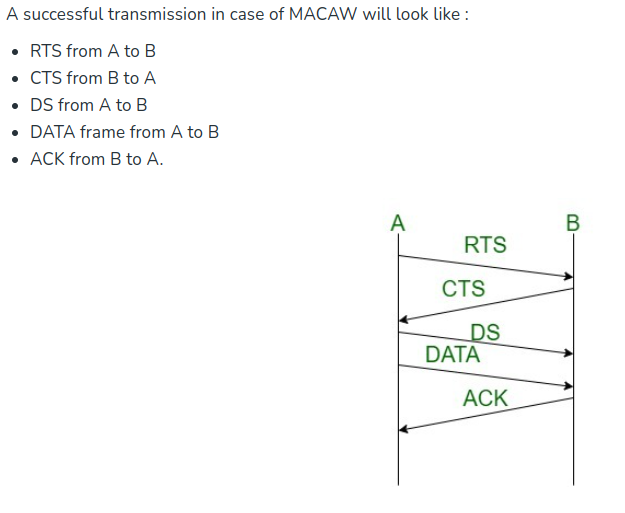
MACAW
Voglio ritardare il RTS in un tempo casuale in modo che non sovrappongano fra di loro. C’è carrier sensing **per gli acks, posso spedire solo quando mando RTS così posso ricevere ack in silenzio. Gli altri quando sentono dovrebbero restare in silenzio.
- RTS
- Carrier sensing (anche questa credo sia la cosa nuova, il sistema RTS/CTS è lo stesso di MACA)
- backoff (questa è l’unica cosa nuov acredo).
L’unico che ha preso la RTS sarà l’unico a comunicare, gli altri stanno in silenzion perché sentono il canale occupato.
Si può settare il RTS threshhol superiore alla soglia per dire che non verrà mai utilizzato.
Che è molto simile a un coordinator function with backoff, solo che questo è senza infrastruttura, mentre nell’altro credo ci sia.
Ad hoc networks
Ci sono delle cose nuove che sono delle veicole infrastructures ossia in realtà non esisterebbe una infrastruttura per questa connessione, ma passa da veicolo a veicolo quindi è una comunicazione locale. fino a un certo punto in cui alla fine si comunica con una infrastruttura. Come se le auto stesse fossero diventati dei sensori del traffico (quindi molte auto ferme riescono a dire se c’è troppo traffico o meno.
non sono ancora diffusi questi servizi, ma stanno arrivanto, u n altro metodo è fare unità di ricarica per i veicoli.
C’è una trasmissione con CSMA/CA , poi c’è una fase di contention in cui si potrebbero trasmettere cose e cose di altro tipo. ci otrebbero essere un sacco di rts che vadano a vuoto. Ognuna delle fasi di rts è un passaggio indipendente in cui si rischia ancora la collisione.
Ma quando trasmette indietro potrei avere delle (la collisione :
- Fast forward intra-stream in cui il RTS del nodo successivo è interpretato dal nodo davanti come se fosse un ACK, questo risolve il problema delle interferenze (la fase di contesa non ci sarebbe più). (c’è un campo che rappresenta il tipo di questo segnale, che valga sia come ack sia come rts).
- Quick exchange inter-stream, se i due nodi intermedi hanno cose da scambiarsi in direzioni diverse, potrebbe essere una buonissima soluzione il fatto di scambiarsi i dati nello stesso stream di dati (dopo l’ack di una direzione viene mandato il dato dell’altra direzione).
Se uno cade allora c’è tempo vuoto e viene interpretato come autorizzazione alla trasmissione
Carrier sensing virtuale
Carrier sensing virtuale sapere che il canale sia occupato senza andare ad ascoltarlo? Appena sentono un RTS, e se sanno la lunghezza del campo di trasmissione classico (Network Allocation Vector NAV) allora sicuramente nessuno ascolta il canale.
Questo fa risparmiare batteria al destinatario. E trasmettere prende un sacco di energia, anche solamente andare ad ascoltare consuma.
FAMA
Voglio utilizzare una soglia adattiva oltre la quale comincio ad utilizzare il meccanismo rts/cts. Solitamente questo mi serve quando ho troppe connessioni.
Se il frame è minore di una soglia allor anon ha bisogno di rts/cts, altrimenti ha bisogno.
Anche questo è per reti ad hoc.
Coordinator functions
Ci sono principalemente due meccanismi che vanno a regolare l’accesso al canale
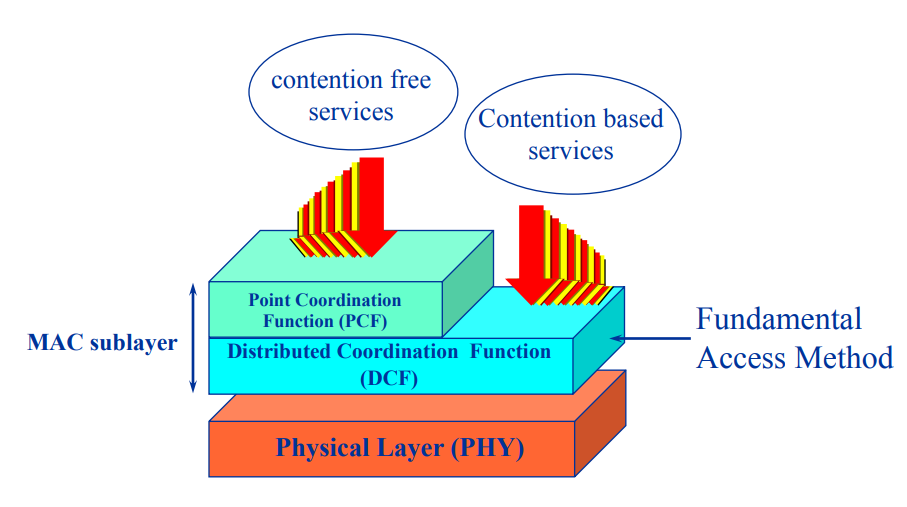
C’è l’access point che fa un beacon e che rende possibile la coordinazione (cose come il nome della rete e annuncio della sua esistenza è il beacon che sempre ogni tanto manda il beacon!).
Una volta fatto una comunciazione coordinata dà il temop alla DCF. In questo momento l’AP non comunca
Point coordination function
-
Slide PCF
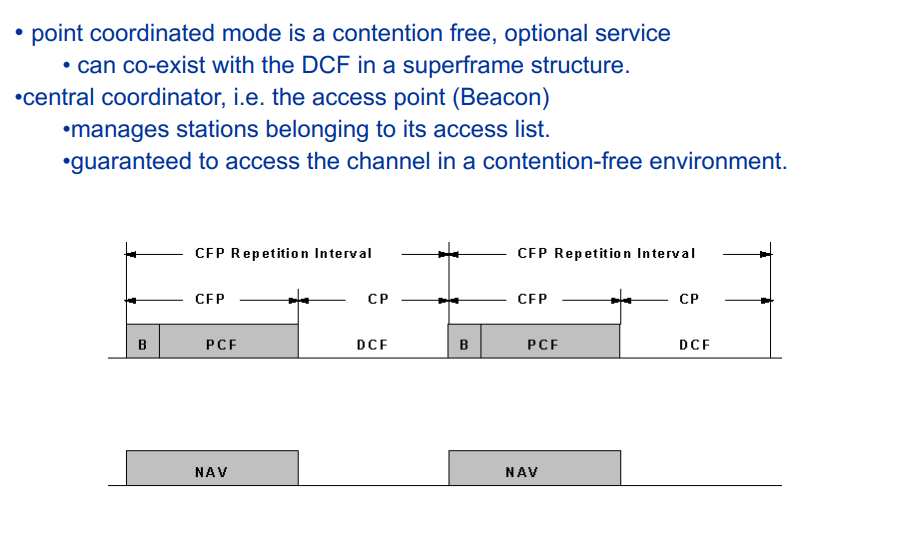
Quando esiste un access point che cerchi di evitare le collisioni e governi tutto la comunicazione nel canale.
Questa cosa è bella perché funziona anche se muore l’access point. Ma alla fine l’unica cosa rimasta è la DCF, quindi abbiamo molte più collisioni. (perché creare firmware era molto costoso).
Inter-Frame spaces
<img src="/images/notes/image/universita/ex-notion/Mac Wifi/Untitled 13.png" style="width: 100%" class="center" alt="image/universita/ex-notion/Mac Wifi/Untitled 13">
Point, ditributed and short,, sono una ddurata di tempo in cui carrier sensing deve avere vuoto prima di poter tentare di comunicare.
Short IFS
- SIFS tempo prima di autorizzare la comunicazione qualcuno che sa già che deve parlare a seconda del contesto (e dovrebbe essere solamente un unico host) Se non parte significa o che sia morto o non ci sia nessuno. E Questo è necessario per avere un PIFS
Point IFS
- PIFS questo è il tempo per far parlare l’access point. se nemmeno questo c’è (ad esempio se l’access point vuole permettere la comunicazione contesa) allora il tempo aumenta e diventa un difs. (può essere che trasmettino un polling, con l’id di quello che deve andare a trasmettere).
Distributed IFS
- DIFS Questo è come dire un liberi tutti quindi si rientra al tempo di contesa del WIFI.
Distributed coordination function
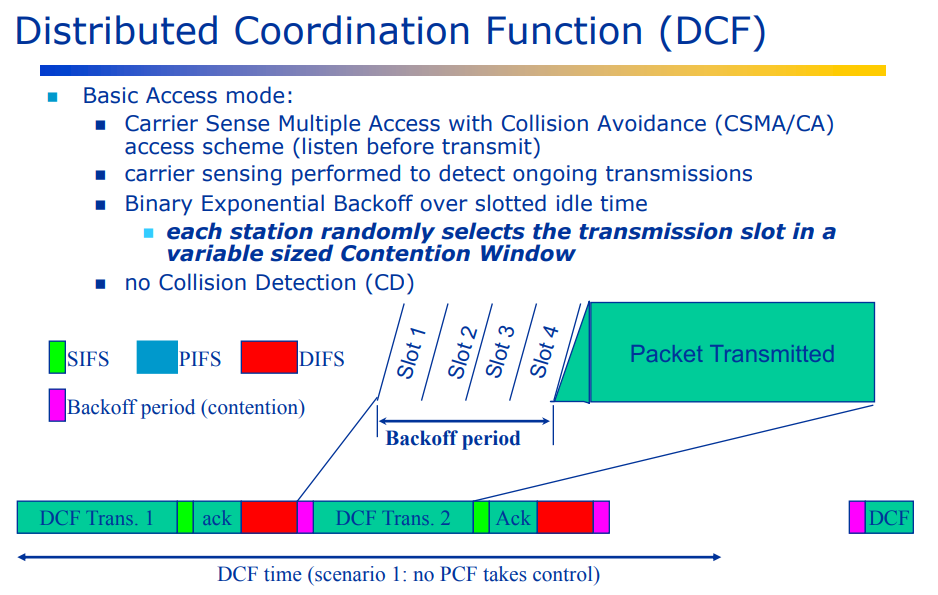
Spazio RTS-CTS anche adattivo con una soglia
Tempo è avoidance con carrier sensing, in un ambiente distribuito. In questo caso tutti provano a comunicare, finché non ci riescono.
Lo slot non è l’intero frame come in ALOHA, ma solamente il tempo di propagazione (esempio il tempo necessario per la luce in 100 metri), gli slots sono messi in questo senso. Nello slot successivo sicuramente il tentativo è stato ricevuto.
il backoff è basato sul numero di questi slot vuoti che abbiamo ascoltato. E se vado a 0 allora mi metto a comunicare in modo descritto da sopra.
Il numero degli slot dovrebbe dipendere dal numero di comunicanti questo non è a priori definito (e non è nemmeno possibile stimarla secondo il prof).
Gestione del back-off
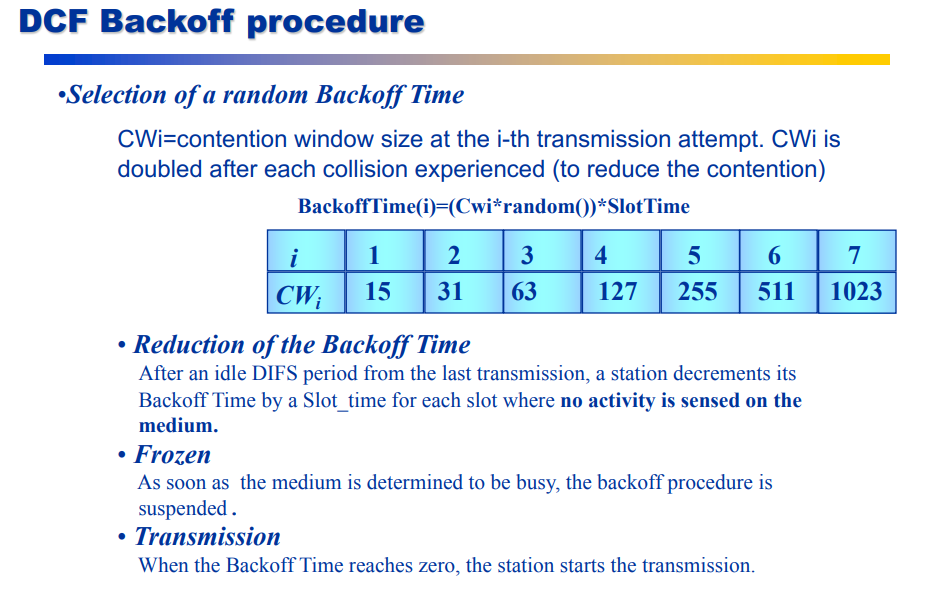
Il backoff è via via crescente, si potrebbe dire che sia la come la dimensione della finestra di contesa CW = contention window che è diversa rispetto alla congestion window, però il signfiicato è completamente diverso! Congestion trattato in Livello di trasporto serve per mandare tot frammenti allo stesso tempo senza far esplodere il router (il livello è diverso!) mentre ora siamo a livello fisico, e si prova a comunicare localmente.
La cosa brutta è che deve andare a sperimentare contesa per sapere quanta contesa ci sia! Per questo motivo si dice che non sia efficiente: se il canale è occupato con questo metodo ci provi lo stesso e quindi vai a disturbare.
Quando va a 0 allora io faccio proprio la tramissi contione e aspetto ack, se arrivo è ok, altrimenti si aumenta timer nel backoff e si rifà. Continua finché non ce la fai.