Nozioni da avere prima di Cambio di Base
- Applicazioni lineari
- La definizione di applicazione lineare
- La matrice associata
- L’esistenza e unicità di una applicazione lineare rispetto a una base
- Le coordinate di un punto rispetto a una base.
Matrice del Cambio di Base
Se ho due spazi vettoriali
- Intuizione in $R$ Le coordinate dei punti in $R$ sono uguali a $V$ per le basi canoniche, ma questo vale solamente per $R$, ora vogliamo andare a dire una cosa più forte, il cambio di base Poi sarà importantissimo questa nozione, applicazione di base in ML è Principal Component Analysis.
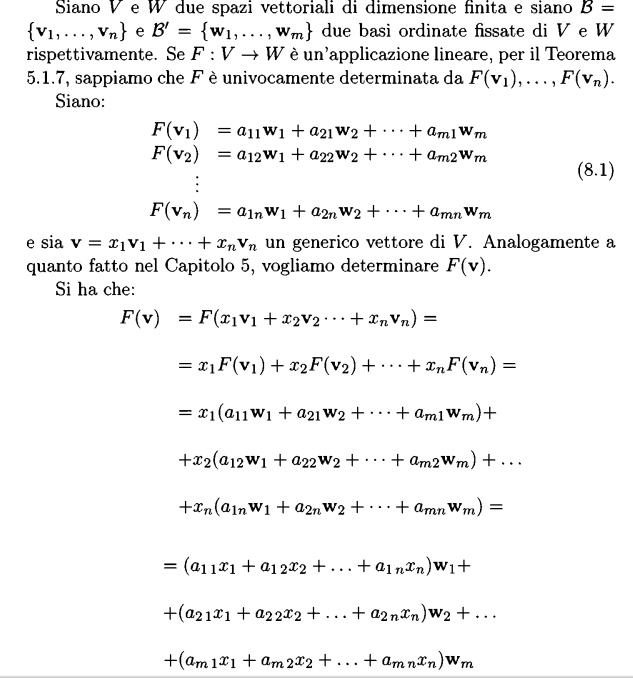
Se ho una applicazione lineare $F: V \to W$ e un insieme di basi del dominio e del codominio, allora esiste una matrice $A \in M_{m \times n} (\mathbb{R})$ tali che vale il cambio di base.
Questa matrice me la costruisco mettendo per ogni colonna le coordinate di $F(v_1)$ rispetto alla base del vettore di arrivo.
$F(v)_{\beta '} = A v_{\beta}$ cioè le coordinate di v rispetto alla base d arrivo è uguale a una matrice (costituita dalle coordinate dell’immagine delle basi ) per il vettore coordinate iniziali.
-
Dal libro
5.2.1 Matrici associate all’identità
Questa m̀atrice sono per applicazioni lineari del tipo $f:V \to W$, $V = W$ e ele due basi sono l’identità. Allora la matrice associata a queste due basi è $I_{\beta \beta'}$
Se le due basi sono esattamente le stesse, allora posso dire che è la matrice identità, la cosa un pò cambia quando le basi sono diverse.
Ovvero se mando la stessa base, le coordinate non cambiano, quindi riesco a costruirmi abbastanza in fretta la matrice identità.
Ossia $I_{\beta\beta} = I$, che è uguale rispetto a una base canonica qualunque.
$$ \begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix} $$e simili
5.2.2 L’inversa della composta dell’identità
Nel libro della prof questa è la proposizione (8.2.2), ed è molto importante
Si ha che $I_{eb} = I_{be}^{-1}$, ovvero la matrice identità per certe basi è esattamente l’inversa. Questo perché supponendo che le matrici associate si comportano bene per la moltiplicazione, ho che $I_{eb}I_{be} = I_{bb} = I$ ovvero è l’applicazione identità. E bisogna anche verificare l’inverso quindi $I_{be}I_{eb} = I_{ee} = I$
5.2.3 Coordinate di un vettore rispetto a una base non canonica
Sia v un vettore nel nostro spazio, e sia b una base di Rn allora si ha che
$(v)_{\beta} = I_{\beta e}^{-1}v$.
Prendiamo in considerazione la matrice $I_{e\beta}$, allora
$id(v)_{\beta} = I_{e\beta}(v)_e$ per come abbiamo definito la matrice, ossia riusciamo a calcolarci le coordinate di v nella nuova base, utilizzando il teorema di sopra /
5.2.4 Composizione fra matrici con basi qualsiasi
Posso dimostrare che un fatto dimostrato precedentemente si comporta bene anche con basi qualsiasi.
Ovvero vogliamo dimostrare che date le funzioni $F: A \to B, G: B\to C$ con ognuna una base, voglio una matrice associata per la composizione di funzioni si comporti bene. (comunque sì si può dimostrare)
5.3 Il cambio di base
L’idea principale di questo cambio di base per applicazioni lineari è ricondurci a una base voluta, più comoda per i nostri calcoli, quindi passare da qualcosa in mezzo
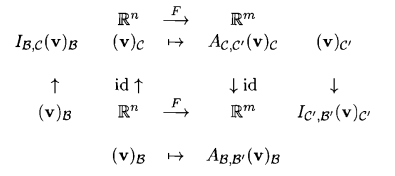
Quindi avremo una applicazione lineare del tipo:
$A_{\beta\beta'} = I_{e'\beta'} A_{ee'}I_{\beta e} = I_{\beta'e'}^{-1} A_{ee'}I_{\beta e}$ ricordandosi che applico le funzioni a destra per prime.
(da notare che la la matrice $I_{\beta e}$ è molto semplice da calcolare, perché l’insieme di arrivo è canonico, e quindi è semplice.
Autovalori e Autovettori
Moved to Autovalori e Autovettori the 19th of July 2024.