È una branca dell'algebra lineare che ci permette di semplificare tutti i concetti.
Intro dualità
![[image/universita/ex-notion/Programmazione lineare/Untitled 8.png]]
- Si fa una sorta di trasposta alla matrice di A.
- y è pari al numero di righe di A
La trasformazione al duale è molto facile, ed è abbastanza intuitiva una volta che capiamo che vogliamo andare a fare l’upper bound.
Dualità asimmetrica
Teorema debole di dualità
-
Slide
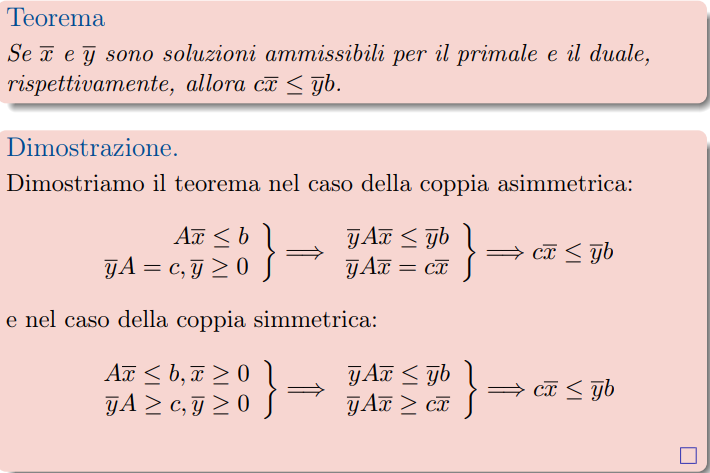
Qui c'è una cosa simile a quanto fatto in MCMF, il cui massimo di x è boundato dal minimo del suo duale, in Tarjan e MCMF.
Corollari di dualità (2)
-
Slide
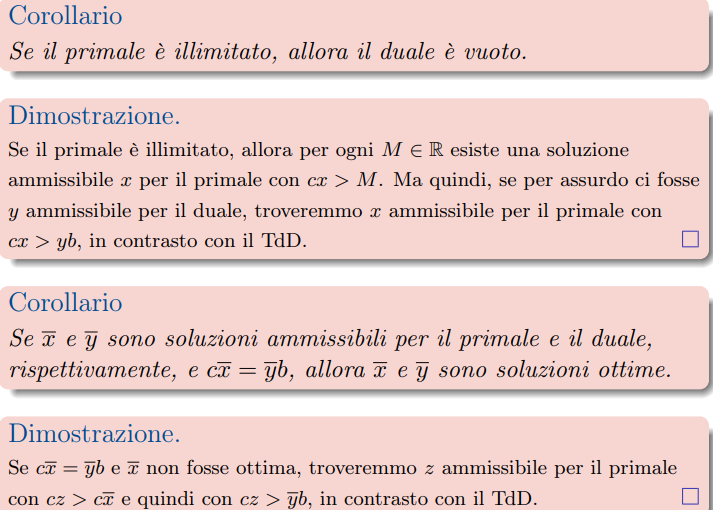
- il fatto che ci sia un bound a x, implica che se x è illimitato, non posso avere il bound!
- Abbiamo una condizione di ottimalità delle soluzioni trovate!
Def Direzioni ammissibili
Vogliamo trovare un modo per muoverci e trovare ancora una direzione ottimale!
Def: un vettore è una direzione ammissibile se esiste tale che , per ogni
Intuizione Ossia se possiamo spostarci di almeno un pò verso la direzione che vogliamo!
Def direzione di crescita
Possiamo considerare una direzione di crescita
La cosa interessante è che una direzione di crescita cresce indipendentemente dal punto, questo è una proprietà molto forte della programmazione lineare! Questi due concetti sono molto utili perché una volta che abbiamo una direzione ammissibile e di crescita allora si può verificare che si può migliorare ancora la soluzione di x.
Suff e nec per direzione ammissibile
- Slide
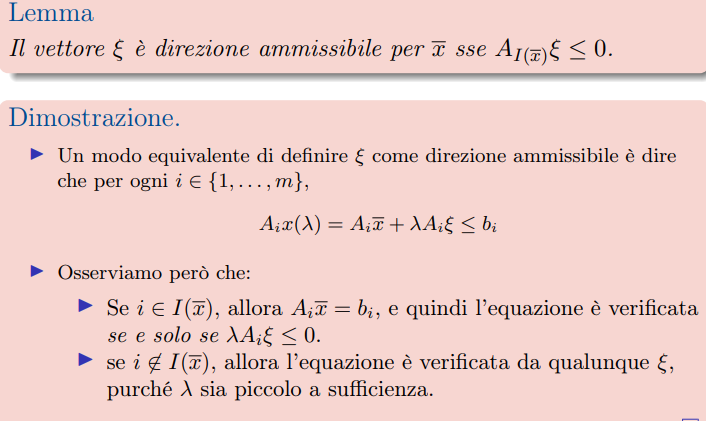
L'idea principale per questa dimostrazione è sui vincoli attivi, differenziare se una riga è un vincolo attivo o meno. Se lo è allora voglio che sia minore, altrimeni basta scegliere un intorno sufficientemente piccolo perché il vincolo è stretto.
Da notare che se non è un vincolo attivo allora ho una disuguaglianza stretta allora posso andare ad utilizzare cose di analisi
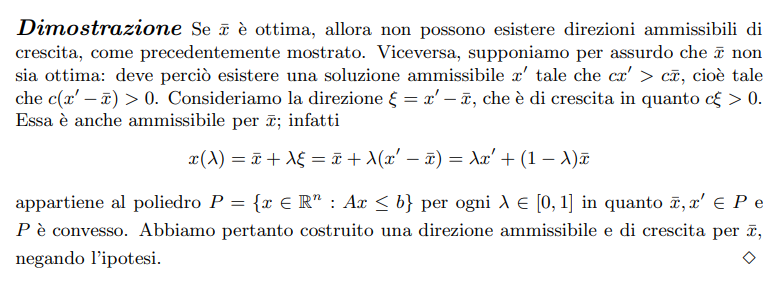
Ottimalità del punto
Dato un punto ammissibile, questo punto è ottimo sse non ci sono direzioni di crescita ammisibile
Intuizione sulla dimo
→ se è già ottimo allora se esistessa una direzione di crescita, si potrebbe far crescere ancora il nostro punto di ottimo, violando l’ipotesi di ottimalità
←Se non ho direzioni di crescita, supponendo per assurdo che non sia ottimo abbiamo allora possiamo trovare una direzione di crescita ammissibile, creando un assurdo, questa direzione la andiamo a trovare prendendo un punto ottimo e creando il vettore da questo punto a quello nostro iniziale.
-
Dimostrazione dispense
!
Legendre Transform
This is also known as Conjugate function in Analisi di Convessità#Conjugate function.
Given a convex function the Legendre transform of this function is the function
This is used in Lagrangian Mechanics for the Eulero Lagrange, and one can see that its dual is the Hamiltonian Mechanics (but need to verify wait).
This has an easy geometrical interpretation, is just the maximum distance between the family of the lines through origin to a point of the function that is under the line.
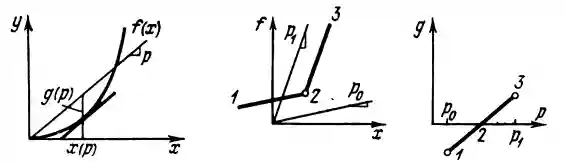 First image is the intuition of the Legendre transform (the straight line and the convex shape), the second image represents how an angle is converted to a segment thanks to this transform.
First image is the intuition of the Legendre transform (the straight line and the convex shape), the second image represents how an angle is converted to a segment thanks to this transform.
We note that because that is an extremum, this will be useful when we prove the involutivity.
Examples of Legendre transforms
One can see that has as dual. has as dual has as dual where .
You got the Idea.
Involutive property
The involutive property asserts that applying the Legendre transform twice gives back the original function.
If we set we have by definition of that , we still need to prove that this is the maximum possible, so that we know that this is indeed the transform.
We can have an easy interpretation of reapplying this operator: we can observe that is the line passing through the origin, and is the distance to a point of the and we know that this point is tangent. It is easy to observe that this point is exactly the of the point of for a fixed .
Young Duality
We say the that are one the Legendre Transform of the other are duals following Young's definition. We have that because is the supremum. This follows that in any case.
AM-GM application
We can prove the classical AM-GM inequality in this way, by setting and we have that .
Similarly we can prove that
Where is valid.
Multi-variable Legendre
Given a convex function (If you don't remember see convexity), meaning that the input is a vector and the quadratic form is positive definite (see Massimi minimi multi-variabile for positive definite matrices) then the Legendre transform is a function where such that everything done for the single case is valid:
Every result of the above is still valid in this case.
Coincidence of specific points
We can prove that given and his Legendre transform then we have that , which has a geometrical interpretation that divides the straight line with a fixed from the to in half.
This proof is easy for the Euler's lemma on homogeneous functions which states that
Which this in mind we can just do the following:
This will allow us to prove some relation between Lagrangian Mechanics and Hamiltonian Mechanics. In particular that .
The Lagrangian
Moved to Lagrange Multipliers.