Vogliamo cercare di restare nel nostro spazio delle soluzioni ammissibili, senza dover stare ad esplorare tutto, vogliamo andare a concentrarci su una parte specifica di essa. Vogliamo utilizzare una struttura fondamentale per i problemi di programmazione lineare, che è quello con cui vogliamo andare a fare. Il fatto è che spostandoci leggermente da un punto tra le soluzioni, possiamo gestire in modo molto semplice il modo con cui si sposta la retta dei valori.
Questo è possiamo ridurci a considerare i vertici del poliedro che si costruisce, quindi andiamo in questa prima parte a definire alcune nozioni matematiche utili a mettere in gioco questa intuizione
Nozioni preliminari
Vocabolario di base
Iperpiano
L’insieme delle soluzioni di equazioni in
$$ \left\{ x \in \mathbb{R}^{n} \mid a^{T}x = b, a \neq 0 \right\} $$E si può dimostrare che questo è un insieme affine, quindi è una linea. Questi piani sono anche convessi perché prendiamo tutti i punti 🤠. Una nota interessante è che in analisi dei dati è molto difficile che i punti non siano linearmente separabili in uno spazio con molte dimensioni. Le nostre intuizioni con low dimensions spesso non funzionano. Un esempio banale è il volume di una sfera n dimensionale, che è molto più concentrata sui bordi.
Semispazio
$$ \left\{ x \in \mathbb{R}^{n} \mid a^{T}x \geq b, a \neq 0 \right\} $$Lo spazio è diviso fra zone in cui è maggiore e altre in cui è minore. Questi non sono affini ma sono solo convessi (perché limitati in certe zone)
Palla euclidea
$$ B(x_{c}, r) = \left\{ x \mid \lvert x - x_{c} \rvert _{2} \leq r \right\} = \left\{ x _{c} + ru \mid \lvert u \rvert _{2} \leq 1 \right\} $$Dove $r$ è chiamato raggio.
Ellissoide
$$ \left\{ x \mid (x - x_{c})^{T} P^{-1} (x - x_{c}) \leq 1 \right\} $$$$ \left\{ x_{c} + Au \mid \lvert u \rvert _{2} \leq 1 \right\} $$Poliedro
$$ \left\{ x \mid Ax \leq b \right\} $$Per qualche valore di $A$ e $b$.
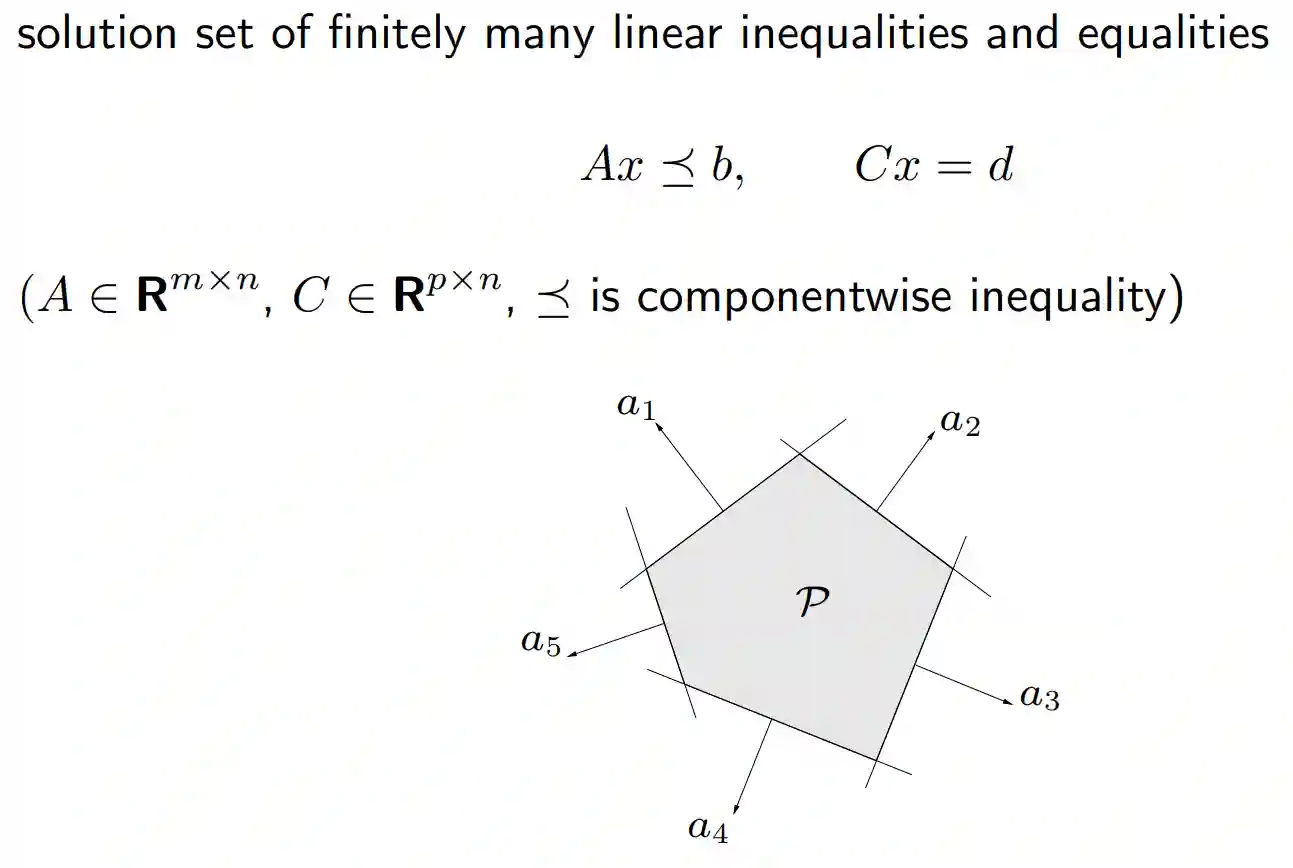
Un poliedro è una qualunque intersezione di semispazi (anche vuota, ma non è molto interessante un poliedro vuoto), ed è un insieme sempre convesso perché l’intersezione di cose convesse è ancora convesso.
L’amico del poliedro che deve essere per forza finito è il politopo. (che è la versione non bounded, ma alcuni autori utilizzano una definizione opposta, ma comunque non è molto importante).)
Facce
Formalmente:
Preso un poliedro, andiamo a definire una sua faccia, un insieme di punti che soddisfano queste caratteristiche:
- Giace direttamente su una o più condizioni
- Giace dentro il poliedro (quindi ogni punto della faccia è un punto del poliedro anche!)
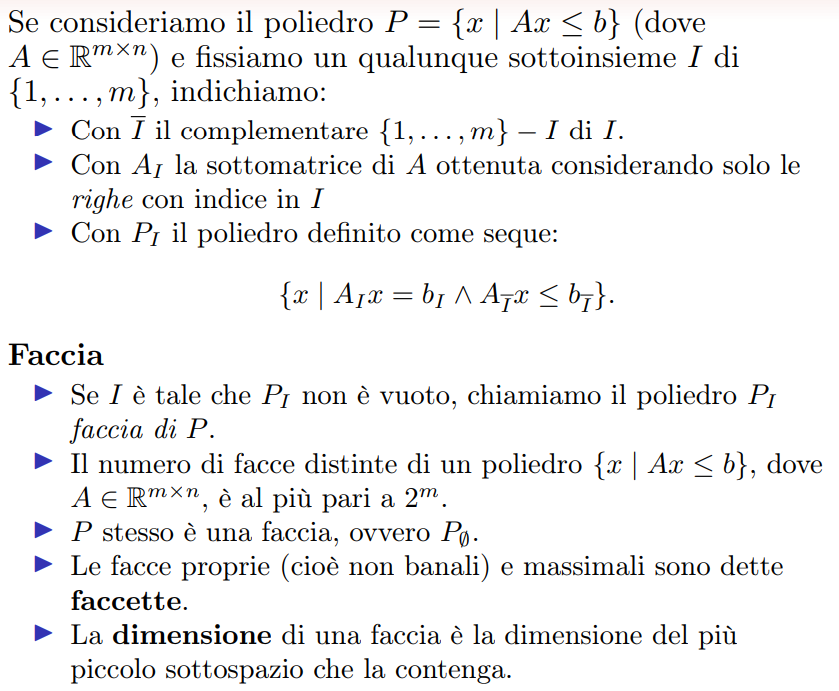
Che matematicamente si possono andare a caratterizzare in questo modo: sia $I$ l’insieme degli indici delle condizioni della matrice del poliedro che andiamo a prendere, e $\bar{I}$ il suo complementare, allora
$$ P_I = \{x: A_Ix=b_I \wedge A_{\bar{I}}x \leq b_{\bar{I}} \} $$Intuitivamente L’intuizione per questa parte è prendere un sottoinsieme che ci piace riguardante la nostra matrice, quella cosa corrisponderà a una faccia del nostro poliedro.
nozioni sulla dimensione della matrice finale è molto buona, ci può dare un concetto di dimensione della faccia che andiamo a prendere. Per fare un esempio, se riusciamo ad avere una faccia di dimensione n, è un singolo punto, quindi è un vertice!
in generale, come dicono le dispense vale la relazione sul fatto che
E` possibile verificare che una faccia determinata da una matrice AI di rango k ha dimensione n − k o inferiore, pagina 8 dispense 3.
Spigoli e vertici e soluzioni base
Una sottomatrice di dimensione n, è un vertice!.
Una sottomatrice di dimensione n - 1 è uno spigolo!.
Questo sarà il nostro spazio di ricerca quelli sui vertifici!
Soluzione di base
Parlano dei vertici e lo fanno attraverso il concetto di invertibilità. Una soluzione di base non è detto che faccia parte del poliedro che stiamo andando a considerare! Vogliamo andare a considerare delle basi ammissibili ossia che sono anche all’interno del poliedro (un esempio ez. è il vertice).
Matrice di base, ammissibilità o non della base.
Vincoli attivi
I vincoli attivi sono vincoli del nostro problema che vengono soddisfatte come uguaglianze. Questa è una cosa di interesse, per ragioni che mi sono ancora oscure.
<img src="/images/notes/image/universita/ex-notion/Programmazione lineare/Untitled 2.png" style="width: 100%" class="center" alt="image/universita/ex-notion/Programmazione lineare/Untitled 2">
Questa notazione più o meno ci dice quante righe della matrice sto andando poi a contare
Cose convesse
Trattate un po’ meglio in Analisi di Convessità.
Inviluppi convessi
Queste cose ci sono molto utili, vanno simili al concetto di Base e dimensione, cercare di riassumere un insieme di punti illimitato con alcuni punti cardine limitati. In questo caso considero l’insieme , $X = \{x_1, ..., x_n\}$
$$ conv(X) = \{ \sum _{i = 0} \lambda_ix_i | \sum_{i = 0} \lambda_i = 1 \land \lambda_i \geq 0\} $$Questo insieme ci è sufficiente per avere un politopo, per il caso infinito dovremmo andare sui coni.
Per ora basta avere un intuizione per questo. Riusciamo a costruire in questo modo tutti i spigoli che uniscono i nostri punti di vertice, e partendo da questi possiamo andare a costruire l’intero politopo, ma la dimostrazione formale non la andiamo a dare.
Coni convessi
See Analisi di Convessità#Convex Cone.
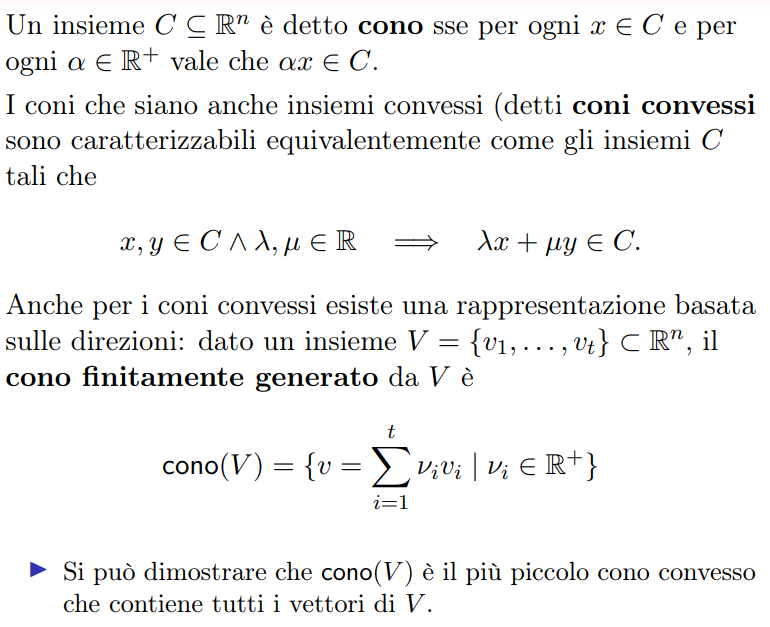
Il concetto di cono convesso ci aiuta a costruire il caso infinito, considerando alcune operazioni di prolungamento e somma
$x,y \in C, \lambda, \beta \in \mathbb{R} \implies \lambda x + \beta y \in C$
Possiamo provare a generalizzare questo concetto utilizzando la somma fra tutti i possibili
$V = \{ v_1, ... v_n\}$
$$ cono(V) = \{ \sum _{i = 1} \lambda_i v_i | \lambda_i \in \mathbb{R} ^+\} $$Teorema di Motzkin o di decomposizione (!)
-
Slide
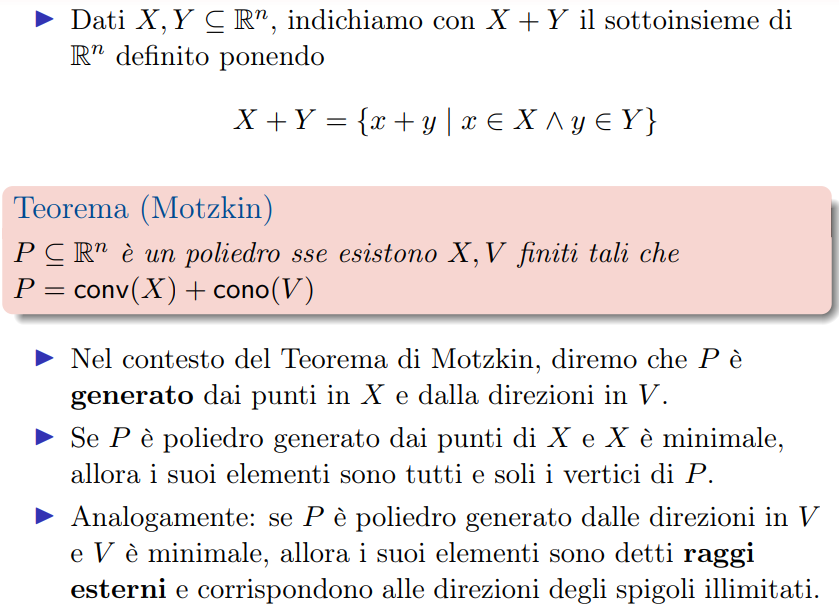
Questo è un teorema molto importante perché teorema caratterizzante dei poliedri!
Intuizione
Più o meno questo teorema ci dice che tutti i poliedri possono essere ridotti a un insieme di punti di partenza, che quasi vanno a formare una base (nel caso del politopo sono solamente questi punti di base, il cono che andiamo a considerare è vuoto!) e poi poter estenderli in una direzione utilizzando il cono!
Differenza dimensione motzkin e vincoli
L’utilizzo più importante di questo teorema è che possiamo caratterizzare i poliedri in modo molto più semplice, differentemente a quanto fatto con i vincoli lineari, perché quelli hanno un’esplosione esponenziale per quanto riguarda il numero di vertici. (nota importnate è che i vertici non si calcolano in modo molto veloce fra i vertici e i vincoli lineari!).
Vertici → exp
Vincoli → lin.
Questa differenza di crescita non ci piace proprio! Non ci piace andare a cercare il numero di vertici se questi vertici crescono in modo esponenziale!
Th esistenza dell’ottimo finito (!!)
$$ P = \text{conv}\left( \left\{ x_{1}, \dots, x_{s} \right\} \right) + \text{cone}\left( \left\{ v_{1}, \dots, v_{t} \right\} \right) $$Then the problem $\max\left\{ cx \mid Ax \leq b \right\}$ has an finite optimal point if and only if $cv_{j} \leq 0$ for all $j \in \left\{ 1, \dots, t \right\}$. In this case $\exists k \in \left\{ 1, \dots, s \right\}$ such that $x_{k}$ is the optimal solution.
- Dimostrazione
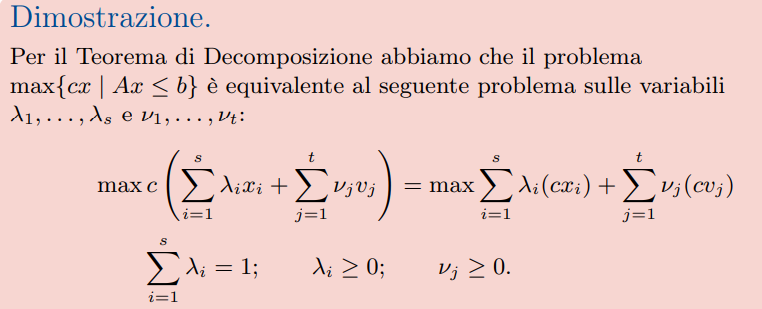
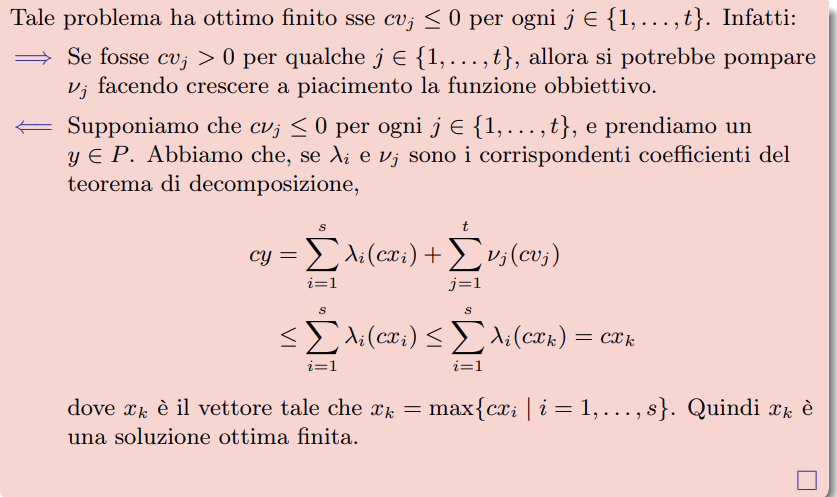
Questo teorema lega in modo molto forte la parte di cono convesso con la soluzione del nostro problema lineare!
ossia possiamo avere soluzione solo se il cono non si espande verso l’infinito positivo, se succede, la soluzione ottimale è infinito, altrimenti possiamo andare a scartare il contributo negativo del cono, e tenerci solamente il contributo dato dalla inviluppo convesso.
Teoria della dualità
Moved to Duality Theory