In this note we explore a theme of time and space complexity. Those are cardinal themes in Theoretical CS. Time -> execution step bounds on algorithms Space -> the cells visited by a Turing Machine when executed.
Introduction to Time Complexity
This note will build upon know techniques of algorithms analysis explained in Notazione Asintotica. We will need big-$O$ notation and $o$ notation. L’idea è che il problema di decisione è decidibile se limito la lunghezza del teorema. Simile al numero di Chaitin, che non è computabile, ma è approssimabile quanto si vuole. In un certo senso è computabile. The general idea is to ask how the function $\varphi$ that maps the longest $n$ proof to the number of steps of computation behaves.
Robustness of the notion of time complexity
The notion of “computational steps” used to measure the time complexity varies along
- Computational models
- definition of computational steps
- The code of the input and output (not always binary, for example big numbers are not fixed size).
Influence of the Computational Model
In Complexity Theory the choice of the formal model influences the complexity class of the model! This is different from the argument from computational theory of the Church Turing Thesis, where it asserts that a function is computable in every computational model. See 7.7 in (Sipser 2012).
Multi-tape vs single-tape TM
It can be proved that every $t(n)$ time multi-tape TM can be simulated by a $t^{2}(n)$ single tape TM. See Theorem 7.8 of (Sipser 2012).
The Time Complexity Class
Definition of the Time Complexity Class
Languages that are decidable in $O(t(n))$ time are part of this class, denoted as $TIME(t(n))$. With $t : \mathbb{N} \to \mathbb{R}^{+}$.
Another way to understand this is that if a algorithms terminates in at most $t(n)$ steps then it belongs to this class.
Polynomial Complexity Class
$$ P = \bigcup_{i \geq 1} TIME(n^{i}) $$This is defined as the class of the reasonable efficiency programs. NOTE: this is invariant with respect to the chosen coding system (if an algorithm is still in P, then it will remain in P even if you change code scheme).
- P is invariant for all models of computation that are polynomially equivalent to the deterministic single-tape Turing machine, and
- P roughly corresponds to the class of problems that are realistically solvable on a computer.
See later.
PATH is in P
We can prove that the language $\left\{ \langle G, s, t \rangle \mid G \text{ is a graph that has a route from } s \text{ to } t \right\}$ is in $P$ class. (Just use Grafi#BFS or Grafi#DFS).
NOTE: we have worked assuming that the algorithm worked on the nodes, but usually TM work with bits, the thing is that there is a polynomial algo that converts that nodes into binary format, so it is not much of a big deal.
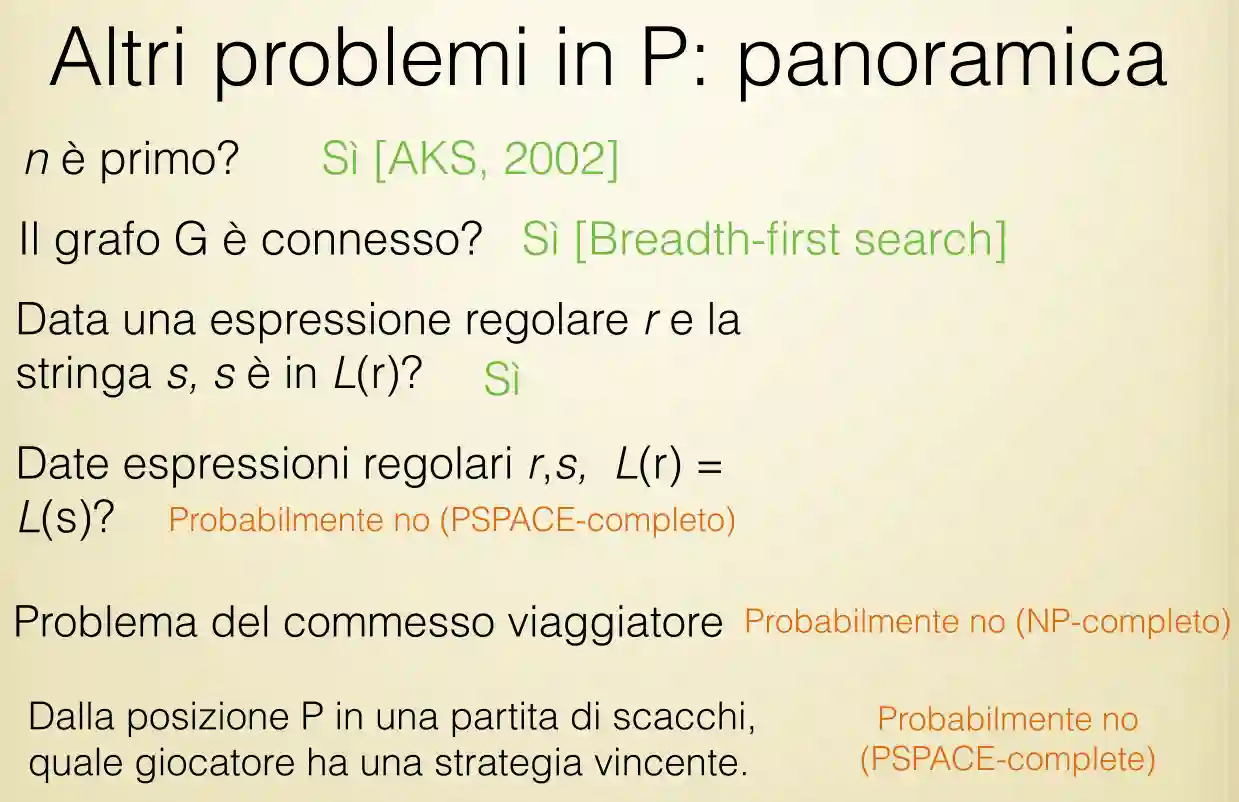
Overview of problems in $P$
Exponential Complexity Class
$$ EXP = \bigcup_{i\geq 1} TIME(2^{n^{i}}) $$This class is common of the algorithms that use backtracking, for example Costraint Satisfaction Problems. Or just brute-force search all the branches.
Non-deterministic Complexity Class
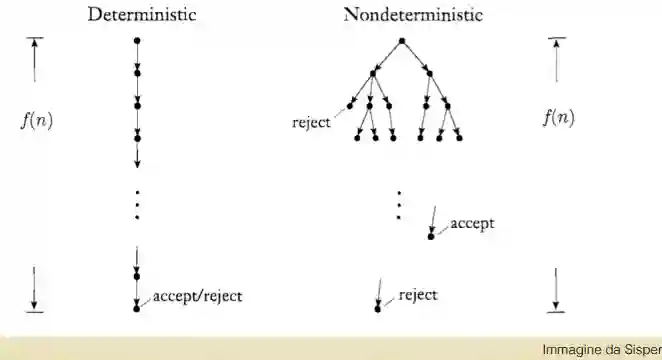
Let $N$ be a non-deterministic decider (which means that the TM will halt on every computation branch) then we have that a problem is in this complexity class, called $NTIME$ if the running time cost $f: \mathbb{N} \to \mathbb{N}$ is bounded by that (longest computational branch). The difference with #Polynomial Complexity Class is that here we consider the length of a single branch, but we explore everything at the same time!
Quindi
$$ NP = \bigcup_{i\geq 1} NTIME(n^{k}) $$Simulation by Deterministic TM
We can prove that every TM in NP can be simulated by a deterministic machine in $2^{Ot(n)}$ time, where $t(n)$ is the complexity class of the TM. The intuition is easy, just try every possible computational branch, and see for the result. We then observe that $NP \subseteq EXP$ but this is not so useful.
Clique problem
See Common problems in Theoretical CS#The Clique problem for description of the problem.
NP algorithm Just
- Select a subset of nodes from $G$. Do it non deterministically.
- Verify if this subset is a complete graph. If yes add it to the solution set.
We can prove that this is correct, and it works, but it is a non deterministic algorithm, so it isn’t easily simulated by deterministic algorithms, even though we proved in Estensioni di Turing e altre macchine that from the computability point of view it is the same.
Verifiable Given input the graph, and a subset, we need to
- For each node in the subset, check if it is linked to each other.
- Return the previous truth result. So easy.
Other NP-complete problems
If you have some time, you should give a proof for each problem (poly-reduction from sat)
- Vertex Cover
- Hamiltonian paths
- Undirected Hamiltonian paths
- Subset-sum
Verifiability
Def: verifiability
$$ w \in A \iff \exists c : M \text{ accepts } \langle w, c \rangle $$If $M$ is polynomial then we say that this is polynomially verifiable. We can prove that this notion is equivalent for $NP$ complexity classes. We also require that $c$ is of polynomial length.
Th: Verifiability = NP
From a philosophical point of view, if a problem is in NP, we can just guess a solution, or just do brute force. There is no classical algorithmical solution that solves it, or a constructive proof for it.
$\leftarrow$: let’s suppose we have a $M$ that decides non deterministically that language. On input $\langle w, c \rangle$ we run $M(w)$ and if it accepts, return true if the branch is good. ($c$ guides us about what non-deterministic branch to choose).
$\to$ : let’s assume we have a polynomial verifier, we need to build a TM that decides it non deterministically in polynomial time. choose non deterministically a certificate $c$ the encodes the path of the non-deterministic computation. If this accepts then accept!
Philosophical thoughts on P vs NP
Intuitively we can have this intuition: The class of problems in $P$ is the class of problems were you need to come up with a solution by yourself. The class of problems in $NP$ is the class of problems were you just need to verify if a given solution is valid. From a personal human point of view this clearly seem to indicate that the two classes are different. But we have no proof.
If P were equal to NP, then the world would be a profoundly different place than we usually assume it to be. There would be no special value in “creative leaps”, no fundamental gap between solving a problem and recognizing the solution once it’s found. Everyone who could appreciate a symphony would be Mozart; Everyone who could follow a step-by-step argument would be Gauss.
– Prof. Scott Aaronson, 2006
Space complexity terminology
Def: space complexity
Given a $\mathcal{M}$ Turing Machine that halts on every input, then his space complexity is a function $t : \mathbb{N} \to \mathbb{N}$ such that $t(n)$ is the maximum number of cells visited by $\mathcal{M}$ on inputs of length $n$. We can say something very similar for the non-deterministic TM, se way that its space complexity is the maximum number of tape cells visited on a single computational branch.
Def: Space complexity Class
We define the space complexity class $SPACE(t(n))$ as all languages decidable by a TM in $O(t(n))$ space. Analogously the $NSPACE(t(n))$ complexity class is defined. We use a non-deterministic TM here.
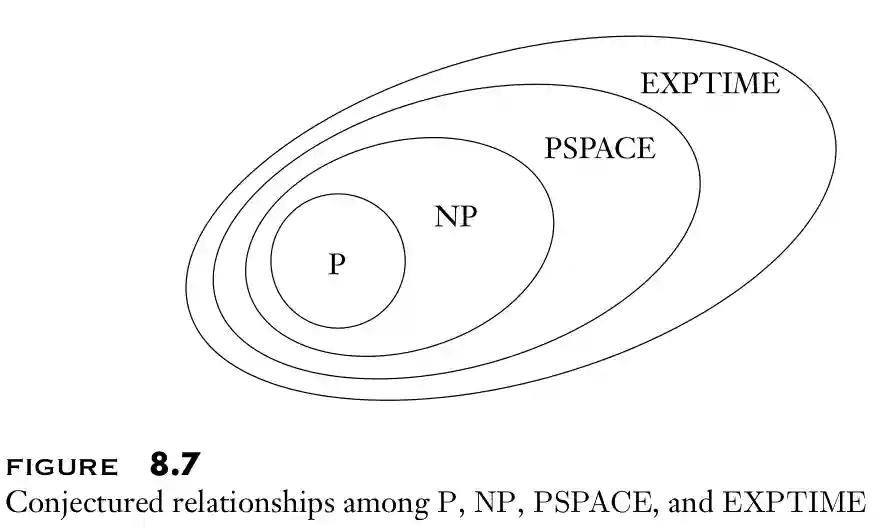
$$ P \subseteq NP \subseteq PSPACE = NPSPACE \subseteq EXPTIME $$
The last subset is given by an observation that a TM that uses $f(n)$ space (PSPACE) cannot have more than $f(n)2^{O(f(n))}$ computational steps before looping.
Def: PSPACE and NPSPACE
$$ PSPACE = \bigcup_{k}SPACE(n^{k}) $$$$ NPSPACE = \bigcup_{k} NSPACE(n^{k}) $$Def: PSPACE-completeness
We say that $L$ is PSPACE-complete if it is $\in PSPACE$ and every other $L' \in PSPACE$ is poly-reducible to it.
Th: $NP \in PSPACE$
In order to prove this we prove that $SAT \in PSPACE$ because as it is $NP-complete$ every NP problem can be reduced to $SAT$ and so it is in $PSPACE$. For more about SAT see Common problems in Theoretical CS#The SAT problem.
Proof of SAT in PSPACE
We note that the simple algorithm that just enumerates all possible assignments is in $PSPACE$. Consider this algorithm: For all assignments for the input boolean formula do:
- Assign it and verify in poly-time if it is ok.
- If ok return true else continue until every assignment is used. We note that just $O(m)$ space is used, where $m$ is the number of terms. All the computation could be done in polynomial space, so the problem is in PSPACE. $\square$.
References
[1] Sipser “Introduction to the Theory of Computation” Cengage Learning 2012